Марат Хамадеев
Марат Хамадеев
Нейронное потенциальное поле помогло роботам лучше избегать препятствий
Обходить препятствия и преграды — это один из самых первых навыков, который человек приобретает в начале своей жизни. Мы делаем это ежедневно не задумываясь, когда идём по комнате или по улице. Но для роботов избегание препятствий представляет большую проблему, над решением которой сейчас активно работают инженеры.
Научить виртуального агента строить маршрут по модельным лабиринтам не так уж и сложно. Алгоритмы для решения этой задачи были предложены ещё в середине прошлого века. Мы уже рассказывали в нашем блоге про то, как их можно улучшить методами машинного обучения. Но реальные ситуации, в которых оказываются роботы, гораздо сложнее. В первую очередь ограничения накладывают конечные размеры и форма робота, а также его кинодинамические характеристики (то есть, ограничения связанные, например, с радиусом поворота колёс).
Всё это можно учесть, если придумать способ, как превратить ломаную линию, которую предоставляют простые алгоритмы, в гладкую кривую, гарантирующую, что робот обогнёт и не заденет препятствие. Это можно сделать с помощью жёсткой системы неравенств, однако более гибким оказался подход, в котором в функцию стоимости задачи оптимизации добавляют штрафное слагаемое, отвечающее за избегание столкновений. Это слагаемое действует так, словно на робота действует некоторое отталкивающее искусственное потенциальное поле (Artificial Potential Field, APF).
Проблема в том, что этот штраф должен описываться дифференцируемой функцией, которую не всегда можно найти, так как обычно APF вычисляется алгоритмически, а не численно или аналитически. Чтобы решить эту проблему команда исследователей из AIRI и МФТИ предложила использовать нейросети, чтобы находить этот искусственный потенциал. Разработка получила название Модель нейронного потенциального поля (Neural Potential Field, NPField).
NPField принимает на вход положение и ориентацию робота вместе с картой препятствий и возвращает значение отталкивающего потенциала, включая его градиент, необходимый для оптимизации. Модель состоит из двух главных блоков: нейросети и контроллера, который планирует траекторию робота. Нейросеть собрана из энкодера и подсети, вычисляющей потенциал. Контроллер также разбит на два блока: для определения набора параметров модельно‑предиктивного управления и для оптимизации по этим параметрам. Полная схема алгоритма представлена на рисунке ниже:
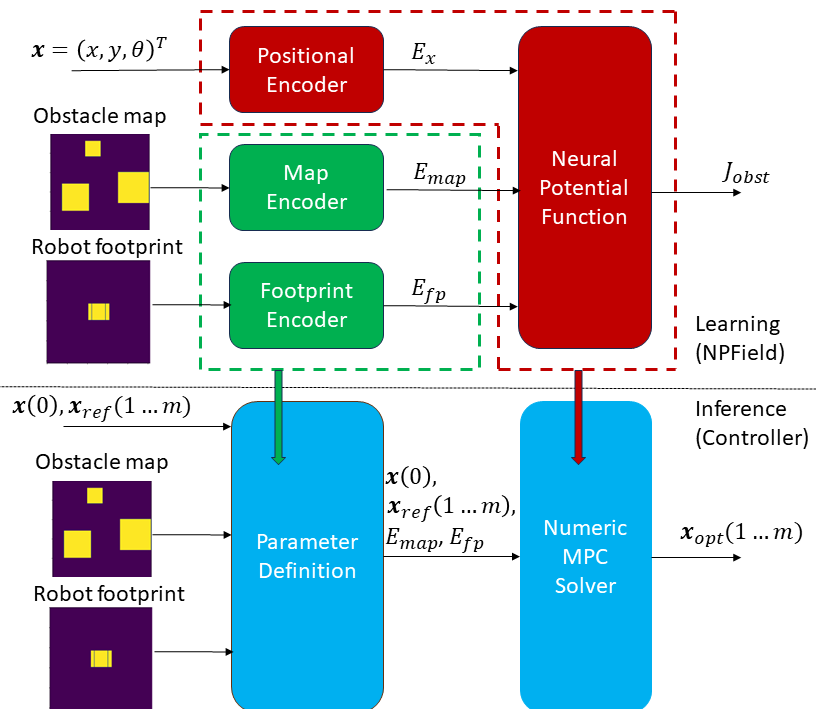
Общая схема предлагаемого подхода
Для обучения модели авторы воспользовались данными о позе и форме робота, картах из набора MovingAI и значениях потенциала, которые были посчитаны алгоритмически. В качестве инструмента для генерации ломанного геометрического пути они выбрали алгоритм Theta*.
Исследователи провели серию экспериментов, сравнивая производительность NPField с некоторыми существующими решениями, например алгоритмом CIAO, используя фреймворк BenchMR. Оказалось, что новая модель в комплексе обеспечивает почти самую короткую длину пути, лучшую плавность и ряд других метрик, хотя по отдельным критериям может уступать бейзлайнам. Исследователи также развернули свою разработку на реальном мобильном манипуляторе Husky UGV, сняв на видео, как он преодолевает извилистый коридор.

Статья с техническим подробностями была представлена на конференции ICRA 2024.